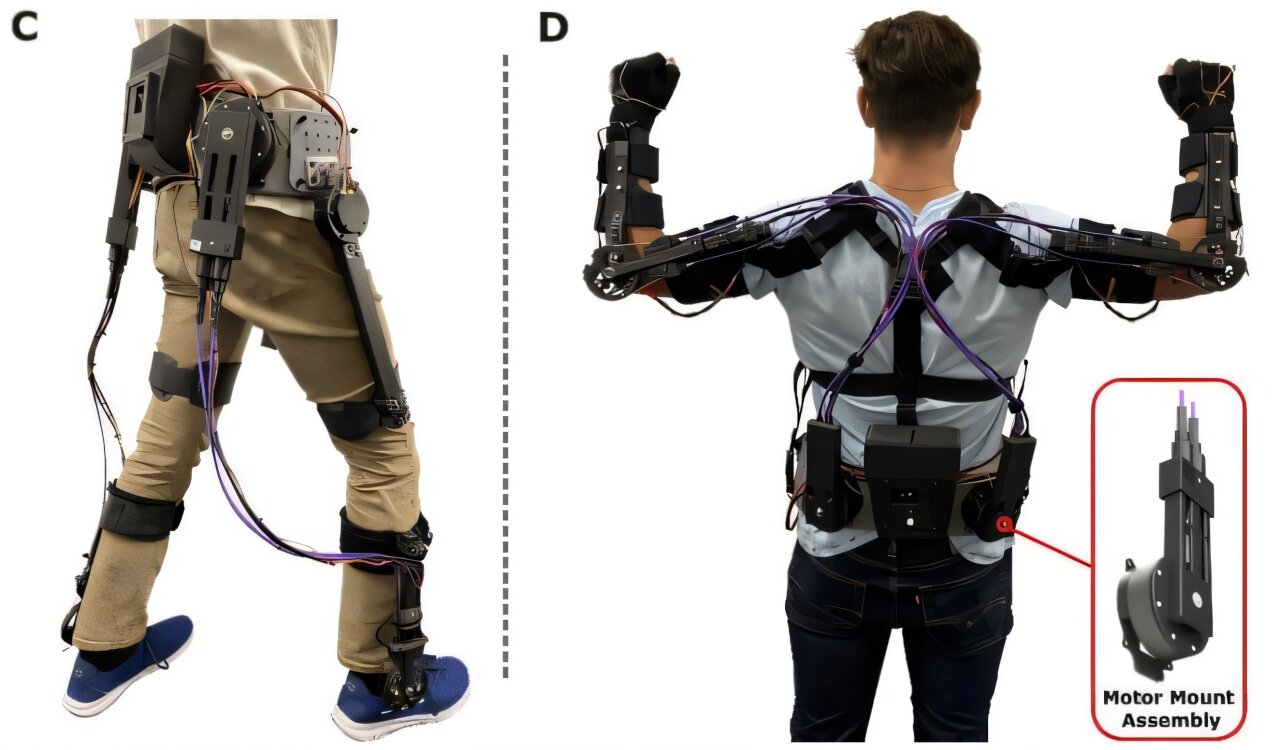
 Combined Hip-Rip-HANKLE EXOSKELETON, d) Elbow exakeleton with the motor mount bowden-value transmission highlighted to emphasize the flexibility of the flexibility of the belt-to-motor interface design, wheel ( Is just the inverted interface utilized for the ankles. Credit: Jack williams et al")
Different Exoskeleton Configurations Operating on Openexo’s Software and Electrical Architecture. C) Combined Hip-Rip-HANKLE EXOSKELETON, d) Elbow exakeleton with the motor mount bowden-value transmission highlighted to emphasize the flexibility of the flexibility of the belt-to-motor interface design, wheel ( Is just the inverted interface utilized for the ankles. Credit: Jack williams et al
Imagine a future in which people with disabilitys can walk on their own, thanks to robotic legs. A new project from Northern Arizona University is Accelerating that Future with an open-Source Robotic Exoskeleton.
Right now, Developing these Complex Electromechanical Systems is Expected and Time-Consuming, Which Likely Stops a Lot of Research Before It Ever Starts. But that mayaras of research from NAU Associate Professor Zach Lerner’s BiomeChatronics Lab has LED to the First Comprehensive Open-Source EXORCE EXORECE FRAMERETON FRAMERETON FRAMEREK, MADE FREEE to anyone worldwide. It will help overcome several huge obstacles for potential exoskeleton developers and resarchers.
An effective exoskeleton must be biomechanically beneficial to the person wearing it, which means that developing them requires extended tror, error and adaptation to specify uses.
EXOSKELETUNS ALESO HAVE HEVE HEVE HEVENT TECHNOLGIES and System Dependencies, and their Development Requires Broad Expertise in many types in many types of engineering, camputer sciance and ever Physiology. Lerner’s System Helps Address All of these challenges because it lets new developers leverage years of Priors of Prior Work, Picking Up Where His Predesorsesrsors LEFT Off.
Called Openexo, Published in Science RoboticsThe Open-Source System Provides Comprehensive Instructions For Building A Single- Or Multi-Joint Exoskeleton, Including Design Files, Code and Step-BY-STEP GUIDES. It’s free for anyone to use.
“Our project is important to the Research Community Security It Significantly Lowers The Barriers to Entry,” Lerner said. “In a time of diminishing federal grant funding, open-Systems like OPEENEXO HAVE BECOME SISTESLY CRITICAL for Facilitating State-of-the-e-eart research on robot-eided rehabitation and mobility Augmentation. “
Lerner’s Team has alredy Helped Children with Cerebral Palsy Keep Up with their Friends and Helped Patients with Gait disorders and disabilities optimize their rehabilitation. That research has resulted in millions of dollars in grant money and launched a spin-off that broughht a robotic ankle device to the market. Lerner and his students have also also been awarded nine pates related to the development of these exoskeletons.
Lerner said he hopes to see research into this area take off through the use of Openexo.
“Exoskeletons Transform Ability,” He said. “There is noting more fulfilling than working on Technology that can make an immediati positive impact on someone’s life.”
Postdoctoral Scholar Jack williams is the paper’s first auth.
More information:
Jack williams et al, Openexo: an open-source modular exoskeleton to augment human function, Science Robotics (2025). Doi: 10.1126/scirobotics.adt1591, www.science.org/doi/10.1126/scirobotics.adt1591
Citation: Researchers Launch Open-Source Robotic EXOSKELETON to Help People Walk (2025, June 25) retrieved 5 July 2025 from https://techxplore.com/news/2025-06- Source- Robotic-exoskeleton- Peeple.html
This document is Subject to copyright. Apart from any Fair Dealing for the purpose of private study or research, no part may be reproduced without the written permission. The content is provided for information purposes only.


